
クムクムロボット[QX-001R3J]で利用できるタイマー割り込み[FlexiTimer2]を使ってクムクムの腕と顔のサーボモータを非同期で動かすプログラムを作ってみます。
顔は腕より細かい単位でうごかしたいので、サーボクラスのwriteMicrosecondsを使ってモータのパルス単位での回転をしてみます。
クムクムロボットのモータポート
クムクムのサーボモータについては、チュートリアルの[6.モータを動かそう] にもまとめたりますがもう一度下記に記述します。
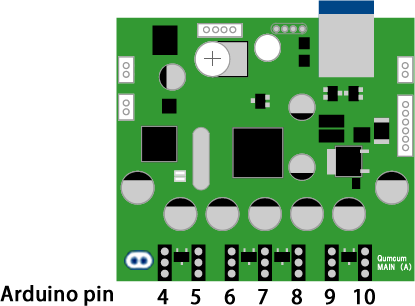
| Arduinoとしてのポート | 部位 |
| 4 | 右腕 |
| 5 | 右足の付け根 |
| 6 | 右足 |
| 7 | 顔 |
| 8 | 左足 |
| 9 | 左足の付け根 |
| 10 | 左腕 |
| 11 | モーターへの電源供給制御 |
作るプログラムの仕様
今日作るプログラムは、両腕を1秒ごとに上下に動かし顔を1ミリ秒ごとに1パルスずつ動かそうというものです。
プログラムとしては、両腕は0度に動かし1秒まったら180度に動かす!という動作をメインのloop関数の中で行います。
顔についてはそれとはまったく別に [Arduinoタイマー割り込みをクムクムロボットで試す]で使ったFlexiTimer2を使って動かします。
プログラム
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 |
#include<Servo.h > #include<FlexiTimer2.h > #define PLS_MIN 500 //モータパルス最小 #define PLS_MAX 2500 //モータパルス最大 #define MOT_FACE 7 //顔モータのピン番号 #define MOT_LARM 10 //左腕モータピン番号 #define MOT_RARM 4 //右腕モータピン番号 #define MOT_POWER 11 //モータ電源 int PLS=500; //回転させるパルス int DST=1; //回転方向決定パルス Servo SV_FACE; //顔モータ割り当てクラス Servo SV_LARM; //右腕モータ割り当てクラス Servo SV_RARM; //左腕ータ割り当てクラス // // 定期的に実行される関数 // void MoveMotor() { PLS+=DST; //回転位置のパルスを計算 SV_FACE.writeMicroseconds(PLS); //顔をパルス位置に回転 //Serial.println(PLS); if(PLS==PLS_MAX)DST=-1; //最大パルスにきたら反転 if(PLS==PLS_MIN)DST=1; //最小パルスにきたら反転 } // // セットアップ関数 // void setup() { //Serial.begin(9600); //while (!Serial) { ; } //Leonardoの場合にはこの部分が必要 //ポートの設定 pinMode(MOT_FACE, OUTPUT); // クムクムの顔のモータ pinMode(MOT_RARM, OUTPUT); // クムクムの顔のモータ pinMode(MOT_LARM, OUTPUT); // クムクムの顔のモータ pinMode(MOT_POWER,OUTPUT); // クムクムのモータ電源制御 digitalWrite(MOT_POWER,HIGH) ; // 電源ON //割り当て初期化 SV_FACE.attach(MOT_FACE,PLS_MIN,PLS_MAX); // 顔モータ割り当て SV_LARM.attach(MOT_LARM); // 左腕割り当て SV_RARM.attach(MOT_RARM); // 右腕割り当て SV_FACE.writeMicroseconds(PLS); delay(1000) ; //タイマースタート FlexiTimer2::set(1, MoveMotor); FlexiTimer2::start(); } // //メインループ // void loop() { //腕0 SV_LARM.write(0) ; SV_RARM.write(0) ; delay(1000) ; //腕180 SV_LARM.write(180) ; SV_RARM.write(180) ; delay(1000) ; } |


コメント