Qumcum HOME 3.0 BASIC で用意されている、Qumcum用のエクステンション(コマンドブロック)について説明します。
LED制御ブロック
Qumcumの胸についているRGB-LEDの点灯と消灯をコントロールします。
| ブロック | |
| 説明 | 指定した色(R:赤、G:緑、B:青)でLEDを点灯します。 |
| ブロック | |
| 説明 | 指定した色(R:赤、G:緑、B:青)でLEDを消灯します。 |
赤、緑、青をすべて点灯すると白になります。
BEEP音制御ブロック
Qumcumのスピーカーから、指定した高さ・長さの単音を鳴らします。
| ブロック | |||||||
| 説明 | 指定の音程で指定の秒数、音を鳴らします。 ※上記例ではラの音が1秒鳴ります。
|


VOICE制御ブロック
Qumcumの音声合成LSIをコントロールします。
ローマ字で指定した言葉をしゃべらせることができます。
| ブロック | |||||||
| 説明 | 指定の速さで指定した言葉をしゃべります。 ※上記例では速さ5で「こんにちは」としゃべります。
|
| 記号 | 文字コード | 説明 |
|---|---|---|
| ‘ | (0x27) | この位置にアクセントを指定します。母音の後に指定する必要があります。 |
| – | (0x2D) | 長音を指定します。例)「ohayo-」⇒「おはよー」 |
| . | (0x2E) | この位置にポーズ(無音区間)が入ります。文の終わりを示します。 |
| ? | (0x3F) | この位置にポーズ(無音区間)が入ります。文の終わりを示します。 文末の声が高めになります。 |
| 半角 空白 |
(0x20) | この位置にポーズ(無音区間)が入ります。 文中の息継ぎの部分に指定します。一般に次の音が高くなります。 |
| , | (0x2C) | この位置に短いポーズ(無音区間)が入ります。 半角空白と機能は同じですが、無音区間の長さが短くなります。 |
| ; | (0x3B) | 次のアクセント句が比較的高い音で始まります。ポーズは入りません。 |
| / | (0x2F) | 通常のアクセント句の句切りに指定します。ポーズは入りません。 |
| + | (0x2B) | 前後のアクセント句の句切りがあいまいな場合に指定します。ポーズは入りません。 |
《ローマ字表》
| あ | い | う | え | お |
| a | i | u | e | o |
| か | き | く | け | こ |
| ka | ki | ku | ke | ko |
| さ | し | す | せ | そ |
| sa | si/shi | su | se | so |
| た | ち | つ | て | と |
| ta | ti/chi | tu/tsu | te | to |
| な | に | ぬ | ね | の |
| na | ni | nu | ne | no |
| は | ひ | ふ | へ | ほ |
| ha | hi | hu/fu | he | ho |
| ま | み | む | め | も |
| ma | mi | mu | me | mo |
| や | ゆ | いぇ | よ | |
| ya | yu | ye | yo | |
| ら | り | る | れ | ろ |
| ra | ri | ru | re | ro |
| わ | うぃ | うぇ | うぉ/を | |
| wa | wi | we | wo | |
| ん | ||||
| nn/n |
| が | ぎ | ぐ | げ | ご |
| ga | gi | gu | ge | go |
| ざ | じ | ず | ぜ | ぞ |
| za | zi/ji | zu | ze | zo |
| だ | ぢ | づ | で | ど |
| da | di | du | de | do |
| ば | び | ぶ | べ | ぼ |
| pa | pi | pu | pe | po |
| ぱ | ぴ | ぷ | ぺ | ぽ |
| ba | bi | bu | be | bo |
| ヴァ | ヴィ | ヴ | ヴェ | ヴォ |
| va | vi | vu | ve | vo |
| ー(長音) | っ(促音) | ||
| – | xtu/子音の連続 | ||
| きゃ | きゅ | きぇ | きょ |
| kya | kyu | kye | kyo |
| しゃ | しゅ | しぇ | しょ |
| sya/sha | syu/shu | sye/she | syo/sho |
| ちゃ | ちゅ | ちぇ | ちょ |
| tya/cha/cya | tyu/chu/cyu | tye/che/cye | tyo/cho/cyo |
| にゃ | にゅ | にぇ | にょ |
| nya | nyu | nye | nyo |
| ひゃ | ひゅ | ひぇ | ひょ |
| hya | hyu | hye | hyo |
| みゃ | みゅ | みぇ | みょ |
| mya | myu | mye | myo |
| りゃ | りゅ | りぇ | りょ |
| rya | ryu | rye | ryo |
| ぎゃ | ぎゅ | ぎぇ | ぎょ |
| gya | gyu | gye | gyo |
| じゃ | じゅ | じぇ | じょ |
| ja/jya | ju/jyu | je/jye | jo/jyo |
| ぢゃ | ぢゅ | ぢぇ | ぢょ |
| zya/dya | zyu/dyu | zye/dye | zyo/dyo |
| びゃ | びゅ | びぇ | びょ |
| bya | byu | bye | byo |
| ぴゃ | ぴゅ | ぴぇ | ぴょ |
| pya | pyu | pye | pyo |
| すぃ | てぃ | とぅ | てゅ |
| swi | thi | twu | thu |
| ずぃ | でぃ | どぅ | でゅ |
| zwi | dhi | dwu | dhu |
| つぁ | つぃ | つぇ | つぉ |
| tsa | tsi | tse | tso |
| ふぁ | ふぃ | ふぇ | ふぉ |
| fa | fi | fe | fo |
距離センサーブロック
Qumcumの目の部分の距離センサーから、障害物までの距離(cm)を計測します。
| ブロック | |
| 説明 | このブロックが実行されると、その時の目の前の物体までの距離を計測します。
※BASICバージョンでは、計測処理のためモーター等の動作が一時的に停止します。 |
| ブロック | |
| 説明 | 計測した距離が代入されるブロックです。この変数を使って様々な処理を行います。 |
《使用例》目の前30cm未満に何かの物体を見つけると440Hzの音を鳴らします。

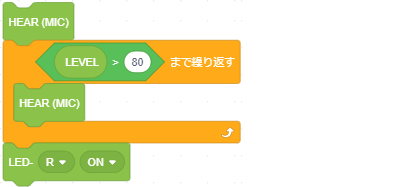
音検知ブロック
Qumcumの胸の部分のマイクより周囲の音を拾うことができます。
| ブロック | |
| 説明 | このブロックが実行された時の周囲の音の大きさを拾います。 0~100までの数字を返します。 |
| ブロック | |
| 説明 | 拾った音の大きさが代入されるブロックです。 |
《使用例》80以上の大きな音を検知したら赤いLEDが光ります。
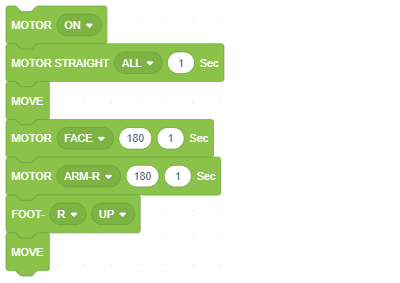
モーター制御ブロック
| ブロック | |
| 説明 | モーター電源をON/OFFします。※上記例はONの例 ONにするとモーターに電源を送り込みます。
|
| ブロック | |
| 説明 | このブロックが実行されるとモーターが動きます。 後掲の《個別動作》《同時動作》を参照ください。 |
| ブロック | |||||||||||||||||
| 説明 | 指定のモーターを「まっすぐの位置」になるようにセットします。 ※「MOVE」ブロックで動作します。
|
||||||||||||||||
| ブロック | ||||||||||
| 説明 | 指定のモーターを、指定の角度になるようにセットします。 ※「MOVE」ブロックで動作します。
|
|||||||||
| ブロック | |
| 説明 | 左足/右足を持ち上げます。※「MOVE」ブロックで動作します。 |
| ブロック | |
| 説明 | 左足/右足を前に出します。※「MOVE」ブロックで動作します。 |
| ブロック | |
| 説明 | L・Rの指定に関係なく、あげている足を下ろします。 ※「MOVE」ブロックで動作します。 |
《個別動作》顔を左に向けてから右腕をあげる

《同時動作》顔(左に向ける)・右腕(あげる)・右足(あげる)を同時実行


コメント