ロボットを動かすことが、そのまま力になります。
未来を机の上で作ろう。
自分のコードで二足歩行ロボットが動きます。
うまくいかなければ、直せばいいのです。
ロボットを動かすことが、そのまま力になります。
自分のコードで二足歩行ロボットが動きます。
うまくいかなければ、直せばいいのです。
ChatGPTはコードを書いてくれます。正解はすぐ検索できます。
でも「何を作るか」は、まだ人間が決めなければなりません。
その力は、手を動かして物を作る体験の中でしか育ちません。
シミュレーションは失敗しません。でも本物のロボットは、思い通りに動かないことがあります。
その「うまくいかない体験」の積み重ねが、AIを使いこなす側の人間を作ります。
京都発。ハードウェアの中身まで公開・改造できる、信頼できる本物の体験装置です。
初めての一歩から、ファームウェア書き換えまで。ひとつのロボットで、どこまでも深く進めます。
API完全公開、センサー追加、ファームウェア改造。限界は、あなたの想像力だけです。
センサーで感じ、プログラムで判断し、ロボットが動きます。
この「知能のループ」を、自分の手で設計できます。
3つのステップで、自分のペースでどこまでも深く進めます。
その先に待っているのは、「自分だけのロボット」です。
ブロックを並べるだけでロボットが動きます。 まずは自由に、面白い動きをどんどん作ってみましょう。
Pythonでロボットをもっと細かく制御できます。 センサーのデータを使って、自分で判断するロボットも作れます。
ハードもソフトも全部自分で改造できます。 クムクムをベースに、まったく新しいロボットを設計しましょう。
「プログラムが書ける人」になるためではありません。
自分でロボットを考えて、作って、動かせる人になるためです。
目的とスキルに合わせて、自分に合ったクムクムを選べます。
どのモデルも、ロボット作りの本格的な体験ができます。
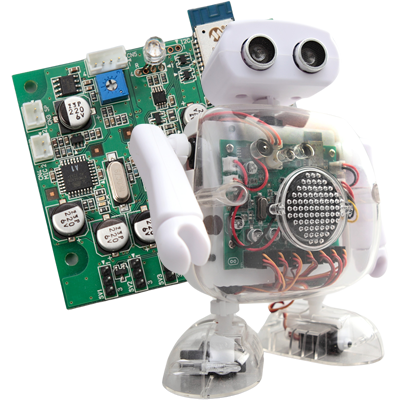
Model: R3J
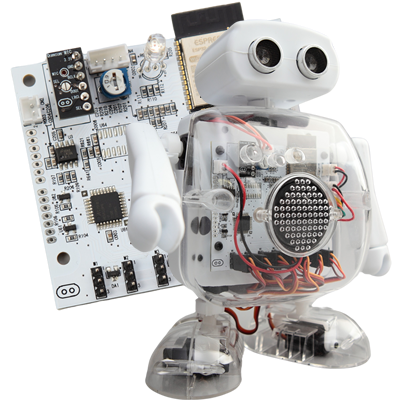
Model: R321E
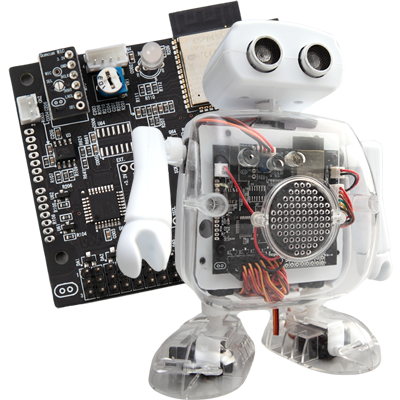
Model: R321J
遊び方は無限大。自由な発想でロボットをカスタマイズしましょう。

Webブラウザを開けば、そこはもうコックピット。
Scratchベースのブロックプログラミングで、ダンスも挨拶も思いのまま。
面倒な環境構築は一切不要です。
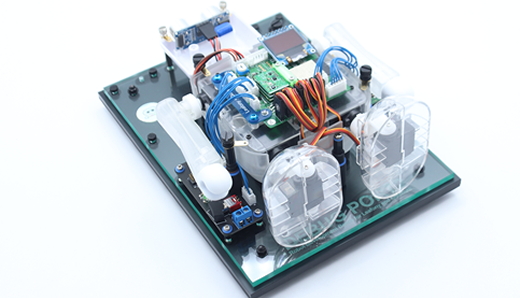
Pythonライブラリを使った高度な制御、ブレッドボード経由でのセンサー追加、 そしてコア部分の書き換えまで。
クムクムはプログラミング教材ではありません。
未来のロボットを、机の上で作る装置です。
自分のコードで動くロボットが、目の前にあります。
うまく動かなければ、直せばいいのです。
そのサイクルの中に、次の時代を生きる力があります。