HARDWARE OVERVIEW
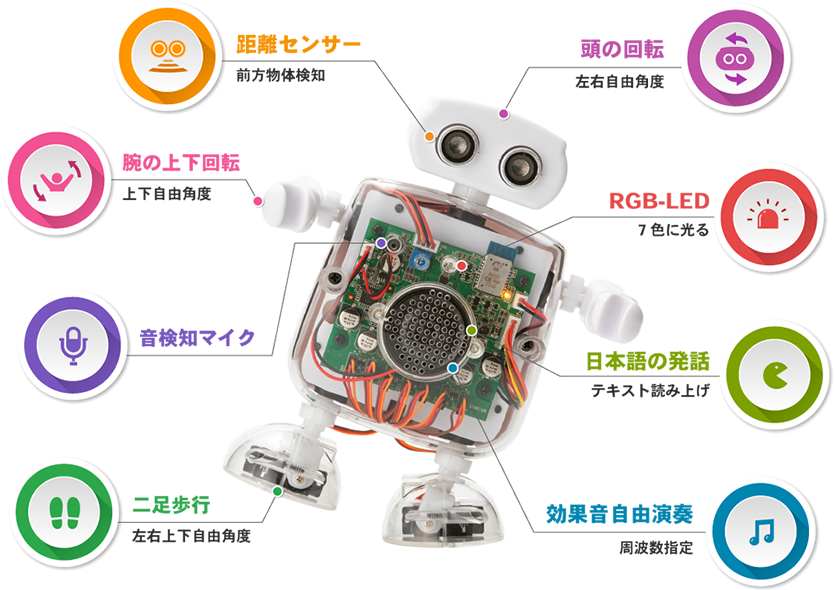
※モデルにより一部搭載センサーや可動域が異なります。
詳細は下部のスペック表をご確認ください。
MODEL COMPARISON
| Item |
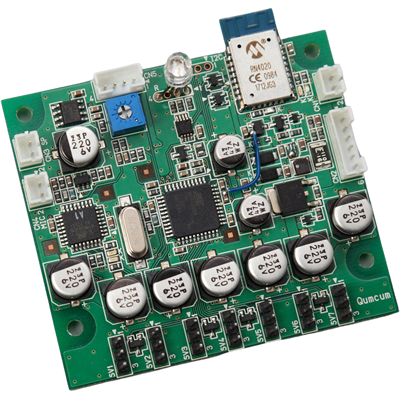
Qumcum Basic
R3J |
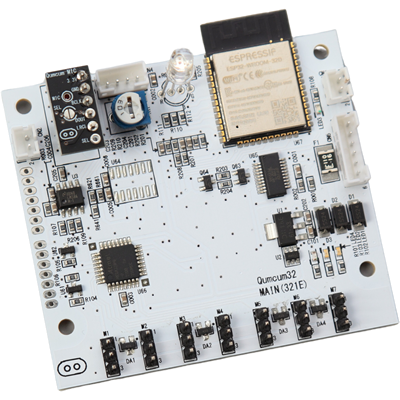
Qumcum SE
R321E |
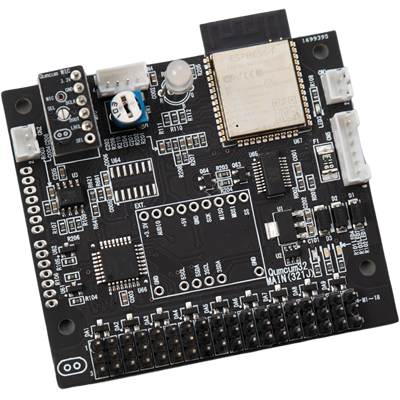
Qumcum PRO
R321J |
|---|---|---|---|
| MCU (Core) | ATMega32U4 | ESP32-WROOM-32D | ESP32-WROOM-32D |
| Degrees of Freedom | 7軸 (足4/腕2/首1) | 7軸 (足4/腕2/首1) | 18軸可 (足4/腕4/首1+11軸) |
| Communication | USB / Bluetooth | USB / BT / Wi-Fi | USB / BT / Wi-Fi |
| Sensors | 超音波距離センサ HS-SR04 | 超音波距離センサ HS-SR04 | 超音波距離センサ HS-SR04 |
| Mic | Analog Mic | Digital Mic | Digital Mic |
| Speak | AquesTalk Pico LSI | AquesTalk ESP32 | AquesTalk ESP32 |
| Sound | BEEP with Analog amp | BEEP with Analog amp | BEEP with Analog amp |
| Ext Port | I2C | I2C/SPI | I2C/SPI |
| Power Source | NiMH or Li-ion 単三型×4 | NiMH or Li-ion 単三型×4 | NiMH or Li-ion 単三型×4 |
| Programmable | Scratch / Python / Arduino C++ | Scratch / Python / Arduino C++ | Scratch / Python / Arduino C++ |
| Hackable Ports | ALL | ALL | ALL |
ARCHITECTURE PHILOSOPHY
クムクムのすべての仕様には、明確な理由があります。
「ケーブルから解き放たれ、仕組みが見えて、すぐに始められる」——
その3つのこだわりが、ロボット体験の質を決めます。
Wireless Native
ケーブルに繋がれたロボットは、どこか窮屈に見えます。 クムクムはBluetooth通信を標準採用し、PCから離れて自由に動き回れます。 ケーブルがないその姿が、本来あるべきロボット体験です。
- Connection: Bluetooth Serial
- Range: Approx. 10m
- Feature: Cable-free Motion
Standard Components
ブラックボックス化された独自部品は使いません。 すべて、ネットで検索すれば情報が得られる一般の電子工作部品です。 壊れても自分で直せる。仕組みを調べれば理解できる。それがクムクムのハードウェアです。
- Parts: General Purpose Sensor
- Repair: User Replaceable
- Document: Datasheet Available
Web-Based Control
環境構築の手間は、作りたい気持ちを削いでしまいます。 だからクムクムは、OSを問わずブラウザひとつで動きます。 思いついたその瞬間に、URLを開くだけで開発ラボが始まります。
- Platform: Chrome / Edge
- Driver: No Installation Required
- OS: Windows / Mac / ChromeOS
RESOURCES
回路図・3Dデータ・ハードウェアマニュアルをすべて公開しています。
中身まで理解して、改造して、自分だけのロボットを作りましょう。