教育用ロボット「クムクム」は、見た目のかわいらしさや分かりやすさだけでなく、内部の部品一つひとつにも強いこだわりを持って設計されています。その代表的な例が、動作の要となるサーボモーターです。
採用しているサーボモーターについて
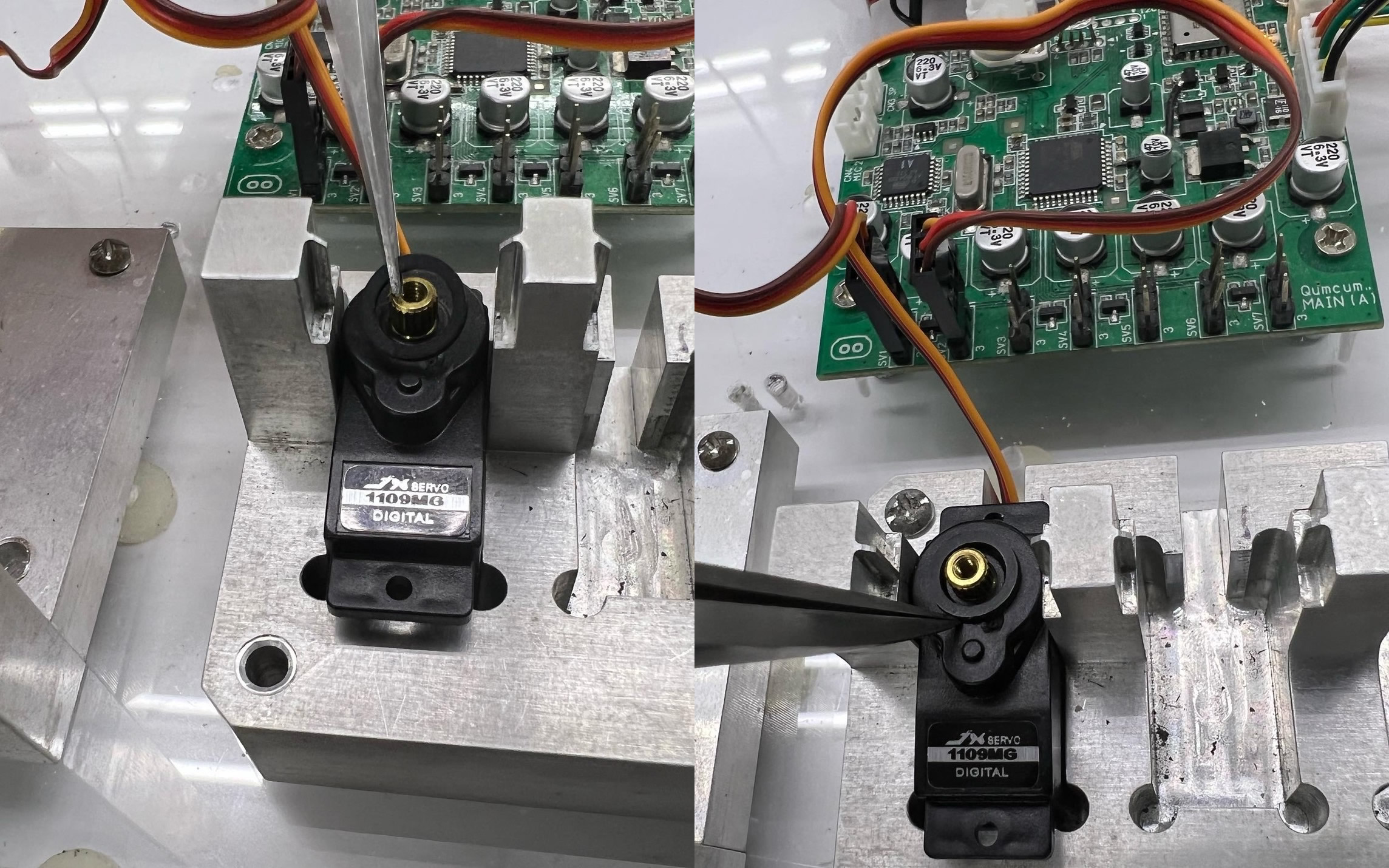
クムクムでは、中国の JX-SERVO 社製のサーボモーターを採用しています。
開発初期には、ラジコン用のミニサーボモーターを複数メーカー・複数機種で検証しました。その中で、価格・性能・入手性・安定性のバランスが最も良かったのが、JX-SERVO製のサーボでした。
写真に写っている 1109MG という型式は、
-
デジタル制御
-
内部ギアはメタル製
-
精度と耐久性が高い
という特長を持つモデルです。ただし、クムクムでは最終的にこのモデルではなく、プラスチック製ギアを採用したアナログ式の「PS-1109HB」 を使用しています。
理由は、教育用ロボットとしての用途、動作の滑らかさ、制御のシンプルさ、そしてコストとのバランスを総合的に考えた結果です。
サーボモーター特有の「震え」の問題
ところが、開発を進める中で、ある現象が発生しました。
それが、サーボモーターがプルプルと痙攣するように震える現象です。
クムクムの足のサーボモーターは、体重が常にかかっているため、上から押さえつけられた状態になります。そのため多少の制御誤差があっても、目立った震えは起きません。
一方で、腕や顔のサーボモーターは負荷が軽く、ある角度で停止させていると、プルプルと細かく揺れることがありました。
この現象は、サーボモーター内部の**エンコーダ(角度検出機構)**と制御信号の関係によって起こります。
サーボモーターの仕組みと震えの原因
一般的なモーターは、電気を流すと回転し続け、電気を止めると停止します。
しかし、サーボモーターは仕組みが少し異なります。
サーボモーターは、
-
指定された角度まで回転し
-
その角度で「止まり続ける」
という動作をします。
この角度制御は、内部のギアとエンコーダによって行われています。
外部から「この角度まで動け」という パルス信号 を送り続け、
-
目標角度(パルス)
-
現在の角度(エンコーダ)
を常に比較しながら、必死にその位置を保っています。
ところが、エンコーダのスリット位置がちょうど境界付近にあると、検出される値が微妙に揺れます。その結果、
-
少し動く
-
行き過ぎる
-
戻る
という動作を高速で繰り返すことになり、見た目には「プルプル震えている」ように見えてしまいます。
解決策として選んだ「特注ゴムリング」
制御方式をより高性能なものに変更する、という方法も検討しました。
しかしそれには、
-
メーカー側の仕様変更
-
部品単価の上昇
-
納期の問題
といった課題があり、結果としてクムクム全体の価格に大きな影響を与えてしまいます。
クムクムは、すでに多くの部分にこだわりを詰め込んでいるため、これ以上のコストアップは、購入していただくユーザ様にとっても現実的ではありません。
そこで発想を変え、
「電子制御ではなく、物理的に震えを止める」
というアプローチを取りました。
その結果生まれたのが、**クムクムのサーボモーター専用に特注で製作したゴムリング(震え止めパッキン)**です。
このゴムリングは、サーボモーターの動作にほんの少しだけ摩擦を加える役割を持ちます。
摩擦を加えることで、エンコーダの境界付近で起こる微細な行き来を抑え、不要な震えを防止します。
現在の動作状況と効果
この震え止めリングを装着したことで、
現在のところクムクムは、腕や顔も含めて震えることなく安定して動作しています。
電子的に「完璧な制御」を目指すのではなく、
-
教育用途として十分な性能
-
安定した動作
-
現実的なコスト
を両立させるための、現場目線の解決策と言えるかもしれません。
クムクムが大切にしていること
クムクムは、最新技術をただ詰め込むロボットではありません。
「なぜこの部品を選んだのか」
「どこにお金をかけ、どこで工夫するのか」
そうした一つひとつの判断の積み重ねで作られています。
サーボモーター1個、ゴムリング1つにまでこだわる理由は、
子どもたちや学ぶ人が、安心して、長く、楽しく使えるロボットでありたい
という思いからです。
コメント