 クムクムに使用しているザーボモーターは0-180度まで回転します。なので、丁度真ん中は半分の90度となります。
クムクムに使用しているザーボモーターは0-180度まで回転します。なので、丁度真ん中は半分の90度となります。
顔がわかりやすいのですが『真っ直ぐ』は左にも右にも向ける丁度真ん中の90度になります。また歩く方向を決める足の付け根の部分や体を傾ける透明足の中にあるモーターも、真っ直ぐ前に向く時は同じように90度となります。
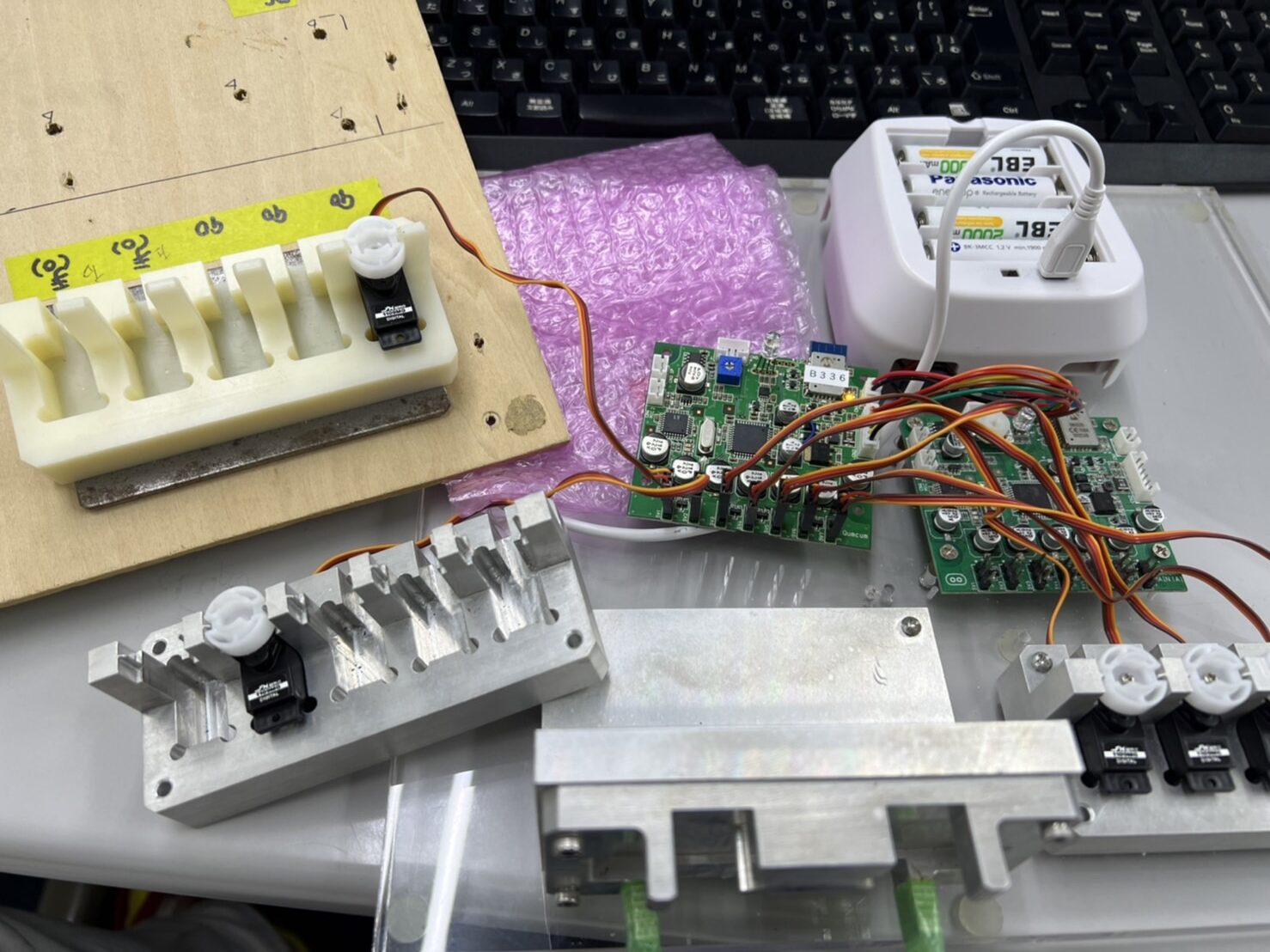
このためクムクムを出荷する際には、全てのモーターを90度にセットした状態にします。その治具(道具)がこの写真のものです。
まず、全てのモーターをこのアルミ製の台座に乗せて90度に回転させるプログラムでモーターを強制的に90度で停止させた状態にします。そこに接続用のプラスチックをセットしてネジを締めるとモーターパーツが完成し出荷できる状態となります。
ただ、接続用のプラスチックパーツにはモーターの軸についている回転部分のギアーの形が切られているため、折角90度にセットされてもギアーの噛み合わせ上多少角度が前後にずれる事があります。
その多少のズレを調整して、プログラムから90度指定をした時にちゃんと90度になるように、WEBサービスの調整画面で微調整をしなくてはなりません。
腕や顔は90度がずれていても大して問題はありませんが、足は、この90度が正しく調整されていないとちゃんと歩く事ができません。
どうもうまく歩かない?という時は、間違えなく足の90度がずれていますので、そのような場合は、落ち着いてしっかり90度調整である、片足立ちを調整して下さい。
また、モーターは使用のたびにギアーなどメカ部分が摩耗する事でズレが生じし同じ様に歩けなくなる事もあります。
こまめに調整をする事をおすすめします。