クムクムはサーボモーター1個にまでこだわっています
サーボモータは、中国のJX-SERVOというメーカのものを使っています。
ラジコン用のミニサーボをいくつか試していくうちに、価格・性能からこのモータに決定をしました。
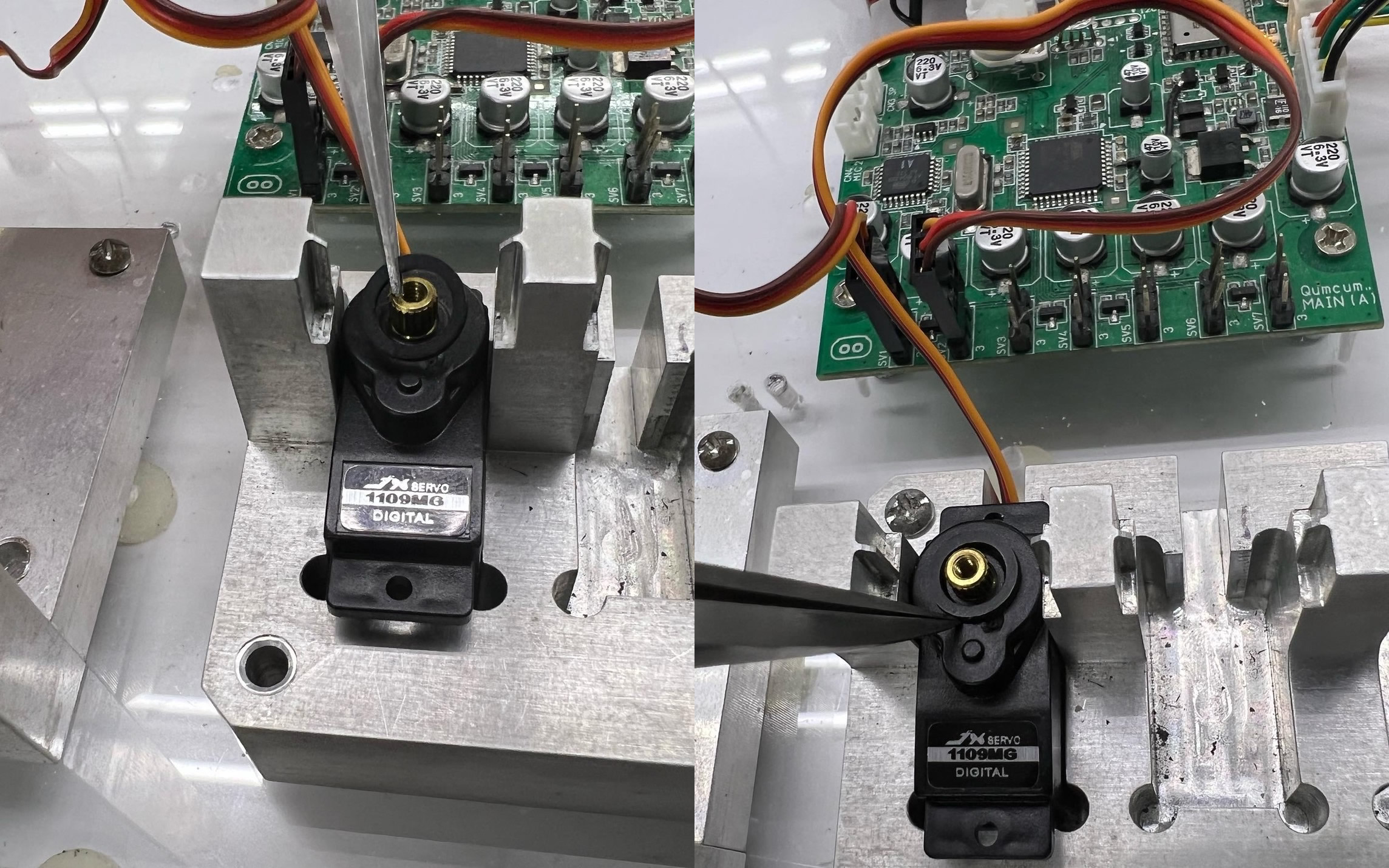
写真に写っている型式1109MGは、デジタル制御で中のギアーはメタルで精度も強さもそれなりにあるのですが、残念ながらクムクムロボットでは、プラスチック製ギアーのアナログ式を使っています。
型式はPS-1109HBというものです。
震える
ところが、このモーター….あるときからプルプルと痙攣しだすようになりました。
足などは体重が載っているので上から押さえつけている状態なのでプルプルしないのですが、腕と顔がプルプルします。
どうもエンコーダのスリットがぎりぎりにいるとき、パルスが揺れてほんのちょっとプルプルします。
そこで少しだけ摩擦を加えてやることで止めることにしました。
特注ゴムリング
このゴムのリングは、クムクムのサーボモーター専用に特注で作った震え止めパッキンです。
普通のモーターは、電気を投入するとグルグルと回転をはじめ電気を止めるまで回り続けますが、サーボモーターは、少し異なり、好きな角度まで回転させて、その角度で停止させることができます。
この回転する角度を決めているのが内部のギアーやエンコーダという部品で、回転させたい信号(パルス)を送ると、そのパルス分モーターを回転させて、回転後はそのパルスを送り続けることでその角度で停止しています。
止まっているときのパルスは送られていて、そのパルスの値とエンコーダからの値を比較しながら頑張って停止しているのですが、微妙にパルスとエンコーダの値が揺れることがありその時回転が微妙に起こります。
行ったり来たり小刻みにすることで、サーボモーターは停止していても微妙に震えることがあります。
クムクムでは、重い体をグッと支えている足のモーターでは、体の重みがあるため多少の震えがあっても目立つことはありませんが、軽い腕や顔などは揺れを出して震える時があります。
防止策として、モーター内部の制御方法をもう少し高性能なものに変える方法もありますが、これはメーカーからの希望価格・納期がクムクムの価格に負担を掛けます。
そうでなくても、様々なところにこだわりを入れているためそれなりに価格的には安くない商品になっています。
これ以上のコストアップはご購入いただくユーザ様にも難しくなることからなんとかこの震えを簡単に安価に止める方法がないか?ということで製作したのがこの震え止めリングです。
この震え止めリングによって今のところクムクムは震えることなく動作する対策をしました。