基板検査ジグ
..ジグ=治具…なかなか聞きなれない言葉です。
業界では冶具(にすい)で書く場合もありますが、どちらもジグですが、インターネットで調べると「治具」は生産をアップするために使用する道具で「冶具」は製造を効率化する工具と書いてあります。
どちらもあまり意味が変わらないように思えますが、「治」は「おさめる」「なおす」という意味があり「冶」は「とかす」「なまめかしい」という意味からすると、「治具」のほうが正しいかもしれません。
いずれにしても、電子基板を作製した場合にその基板を製品に埋め込む前にちゃんと正しく動くか?をしっかり事前チェックする必要があるのでこういった道具を使います。
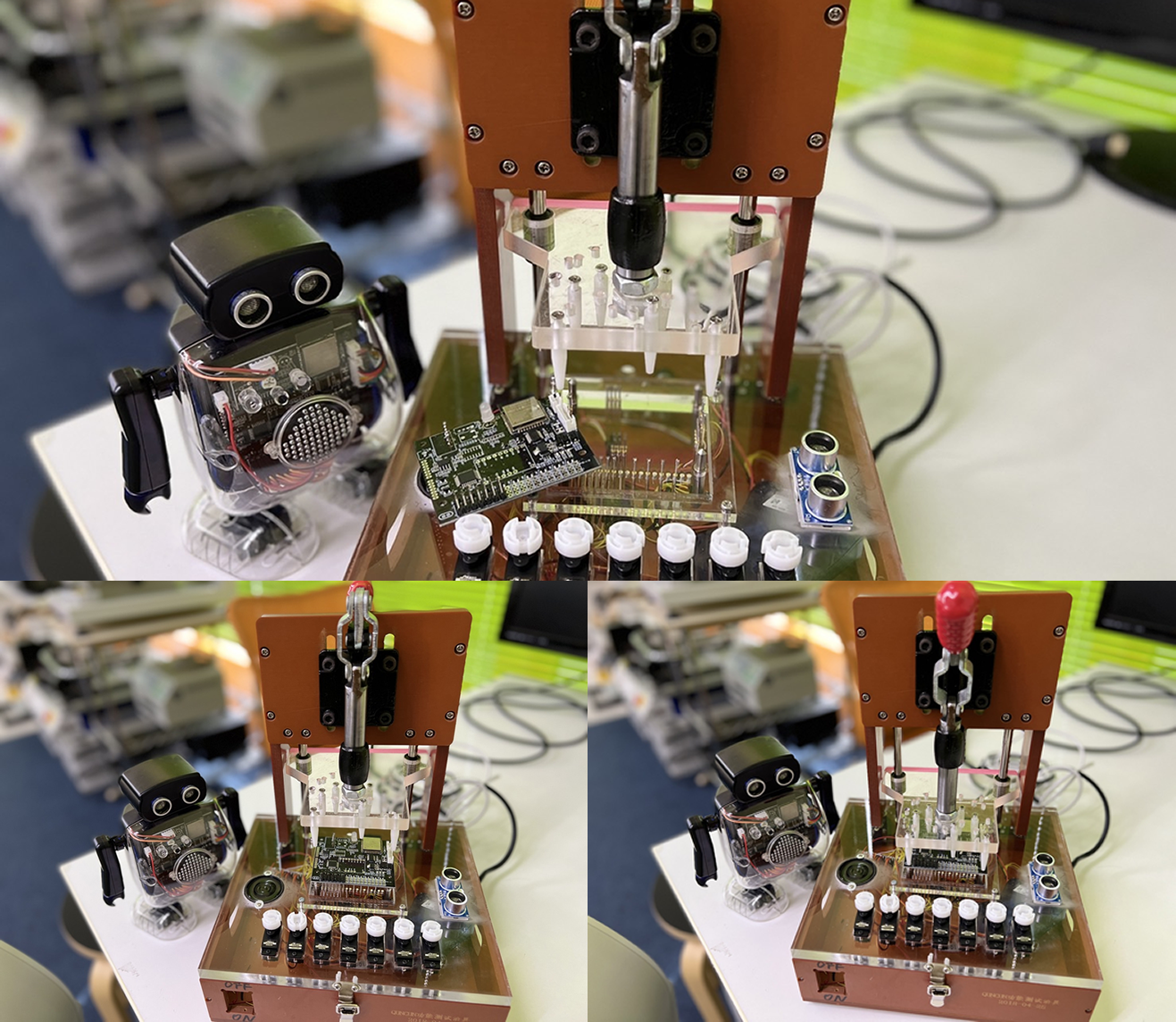
基板の裏には部品を取り付けた半田部分があり、ここに導通するチェック用のピンが接触するように作られています。
チェック用のピンは、ピンの中にバネが入っていて基板をおしあて上のハンドルをしたに下げるとぐっと押し込んだ状態で基板のチェックポイントに接触します。
クムクムの基板では、モーターやセンサーなど主要部品を取り付けるコネクター部分にピンが接触し、チェック用のプログラムを動かすことで基板が正しく動作するかをチェックできるようになっています。
機能が多くチェックする項目が多い基板の場合にはテストポイント(TP)を用意しておいて、そこの電圧や信号を取り込んだり、基板の中にチェック用のプログラムをあらかじめ埋め込んで置き、あるタイミングで走らせることで自動チェックをかけたりしますが、クムクムはとても単純な基板なので、一通りの部品の動作チェックを行います。
基板のコネクターに部品のコネクターひとつづつさしてチェックする方法もありますが、それだとかなり効率が悪いためこのような治具を用意します。
この治具だと、基板をおいてハンドルを回し、プログラムを書き込み動作をチェックしハンドルを回して基板を取り出す、という作業だけで簡単にだれでも効率よくチェックができます。
実はこの治具は、もともと基板を製造してもらっていた中国の工場で使っていたものですが、made in Japanを目指してすべて日本に移管した際に買い上げたものを改造しました。
この治具も….弊社の京都オフィスで作成しました。
もともと違う基板の検査治具のベースをはずしアクリル板にレーザ彫刻機で加工したものを使用しています。
チェックピン(コンタクトピン)はアマゾンで売っている安いものは中国製で耐久性や接触精度に結構問題があるので、すべて日本の業者から購入しています。
一番大事な部分ですから….