クムクムロボットの背中部分、電池を装着する部分には購入いただいたときに既に電池接点と基板へ繋ぐためのケーブルとコネクターが取り付いていますが、これも全て1台1台京都で出荷前に作っています。
接点の構成
クムクムロボットに使用されている電池BOXに使われている単三型接点はすべてオリジナルで製造した日本でただ一つの部品です。
クムクムロボットを設計した段階で、単三型電池を4本使うことを決め、いざ市販品での接点を探し出したのですが、当時はなかなか見つからず、見つかった唯一の接点はセットで240円…
さすがに接点だけで240円は難しく、結局すべてを設計して作ってもらうことにしました。
使用している接点は4種類で、これをうまく組み合わせることで電池ボックスを構成できました。
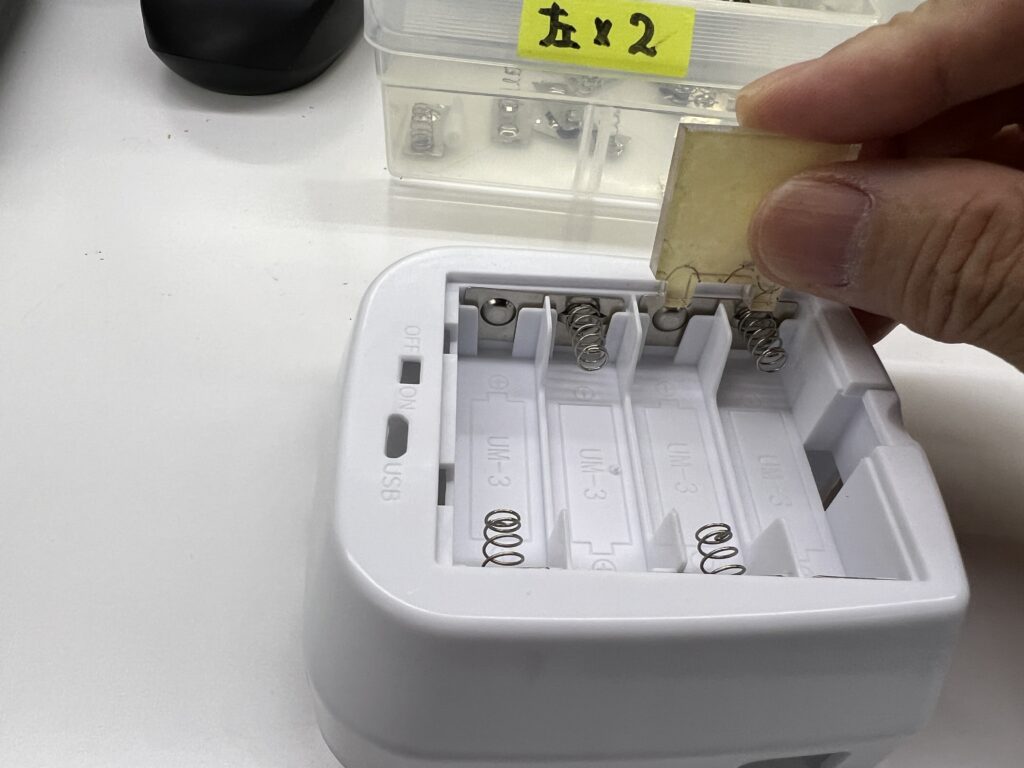
ロボット電池接点製造工程①:接点と電池ボックスの用意
まずは4種類の電池接点とクムクムロボットの電池ボックスを用意します。
電池接点とそれらをセットする電池ボックスの場所の横に置くとこんな感じです。

ロボット電池接点工程②:電池接点を溝に軽く押し込む
つぎに各電池接点を溝に軽く押し込んでいきます。
上下方向があるので気を付けて押し込みます。

工程③:ロボット電池接点専用のジグで奥まで押し込みます
専用のジグといっても、社内のレーザー彫刻機で製造したアクリルの押し込み用の道具ですが、結構こんな地味な道具なのですがあると無いとでは大違いなのです。
この専用ジグが無いと、マイナスドライバーなどで電池接点押し込んでいくことになるのですが、それはかなり気を遣う作業です。
いつ電池ボックスのどこに傷をつけてしまうかわかりません。
また、2連結している横長の電池接点は、片方だけを押し込むともう片方が入らなくなるため、両方均一の力で押し込む必要があります。
実はこの電池接点は、下の方が膨らんでいて押し込むと逆側に抜けない構造となっているため、押し込むのには結構な力が必要です。
ということで電池接点専用のジグで押し込んでいきます。
工程④:ロボット電池接点電源ハーネスを用意します
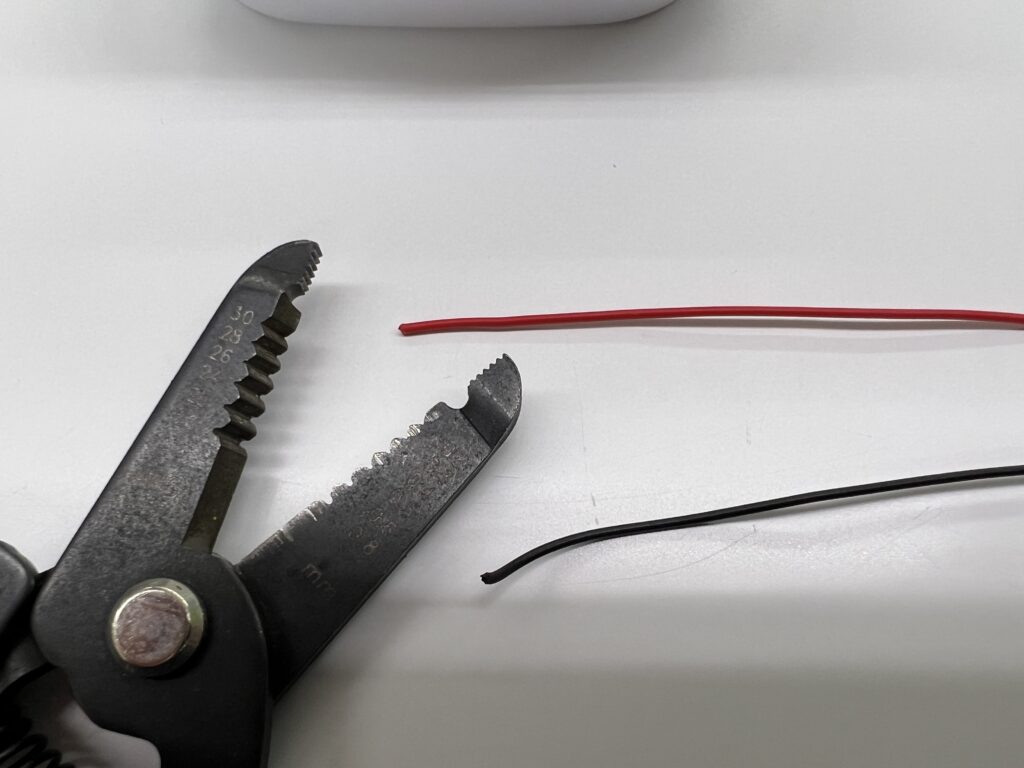
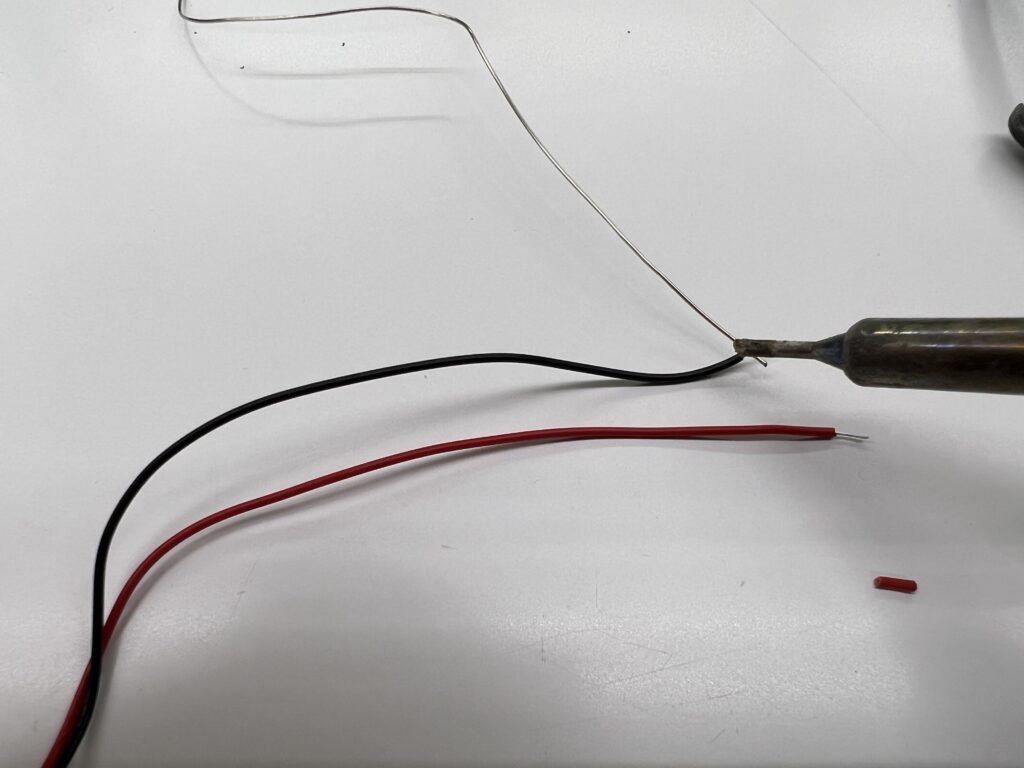
JST型のPHコネクタの2ピンのハーネスをあらかじめ用意しておき、電池接点側の被膜をワイヤーストリッパーでむき予備半田をしておきます。
この予備半田…これも結構地味な工程なのですが、これが結構仕上がりに影響してきます。

工程⑤:ロボット電池接点接点側にも予備半田
またまた予備半田です。直接ワイヤーを電池接点にドンと半田付けしてしまってもいいのですが、やはり仕上がりの綺麗さや強度にはこだわりたいところです。
隅々にまで気を使って作っていきます。

工程⑥:ロボット電池接点ハーネスの半田付け
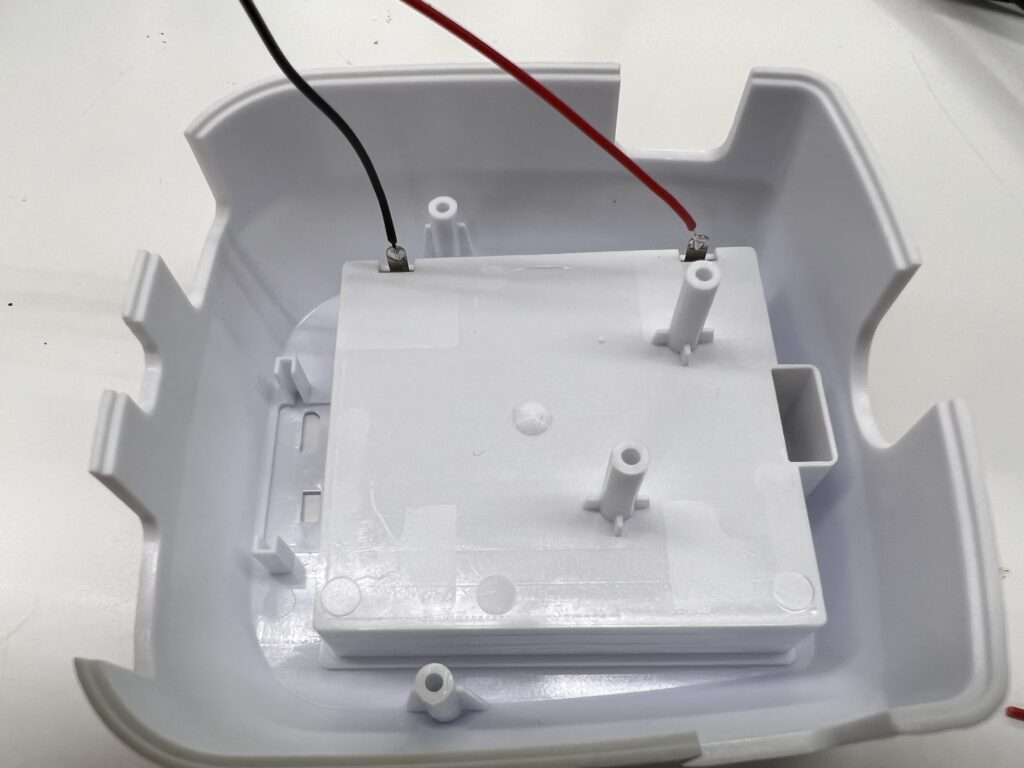
いよいよハーネスと電池接点を半田付けします。
全ては予備半田済なので接点のところにハーネスの先の部分を近づけて半田ゴテではんだを溶かして付けるだけです。
予備半田のおかげでこんなに綺麗に仕上がりました。
工程⑦:ロボット電池接点工程:接点の曲げです
最後は、クムクムロボットのモーターボックスがこの上に乗ってきたときに、電池接点が邪魔にならないように接点を曲げます。
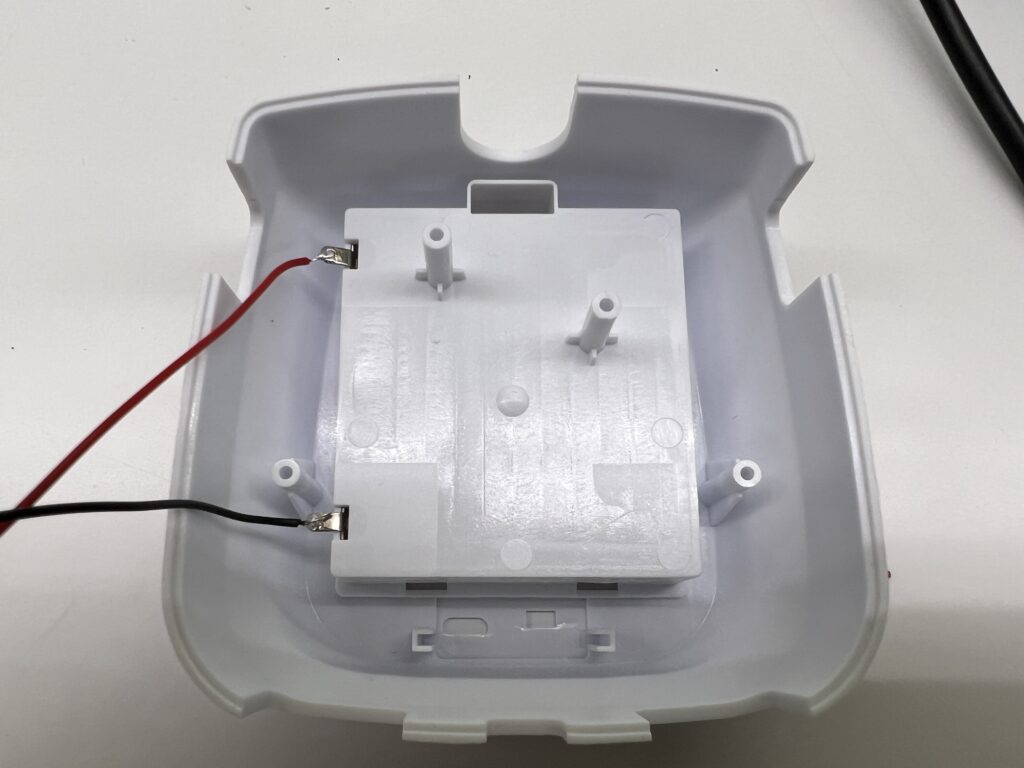
完成しました。
実際には、被膜を向いて予備半田されたハーネスはあらかじめたくさん用意しているため、電池接点の装着と半田付けの作業だけなのですが、この接点の装着はプラスチックに傷を入れないように本当に気を遣う作業です。