クムクムロボットボード構成とパーツ接続とその機能
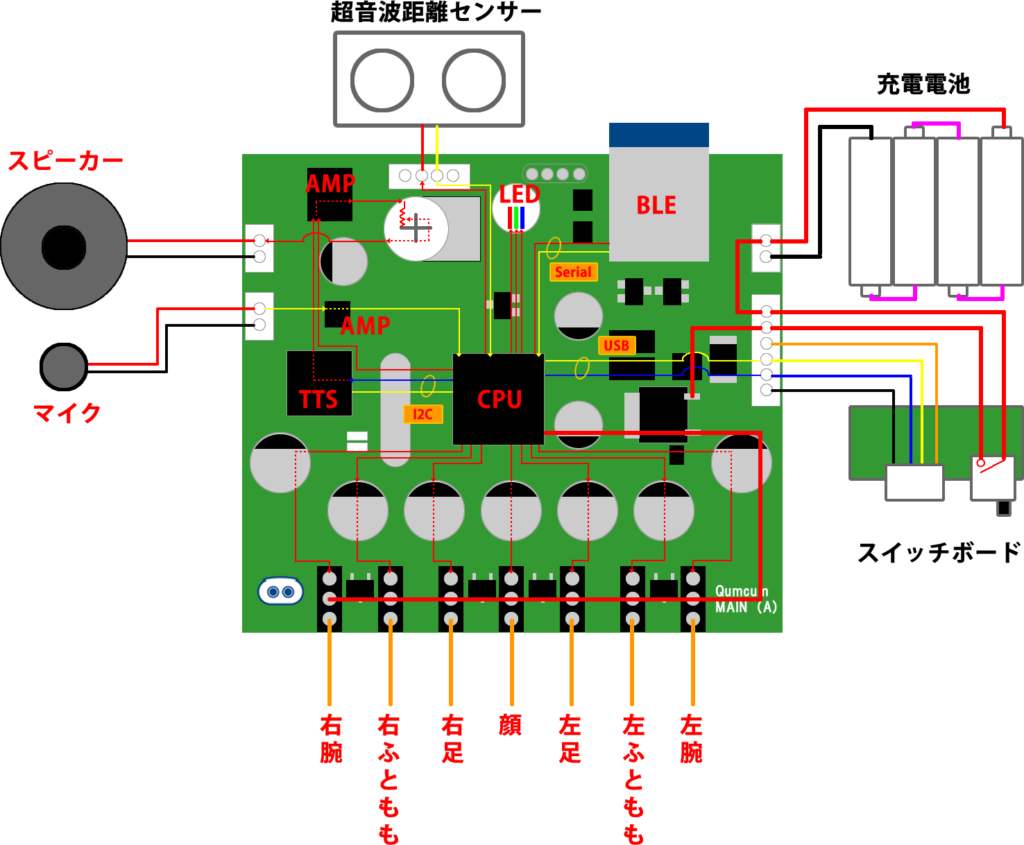
QX-001R3Jのメインボードとパーツの構成は下記の図の通りです。
I/Oポート番号
各パーツは下記のように接続されています。
Arduino列は、実際にArduinoのプログラムでプログラミングする際のポート名です。

使用しているCPU(ATMEGA32U4)のピンアサインを念のために見ておきましょう。
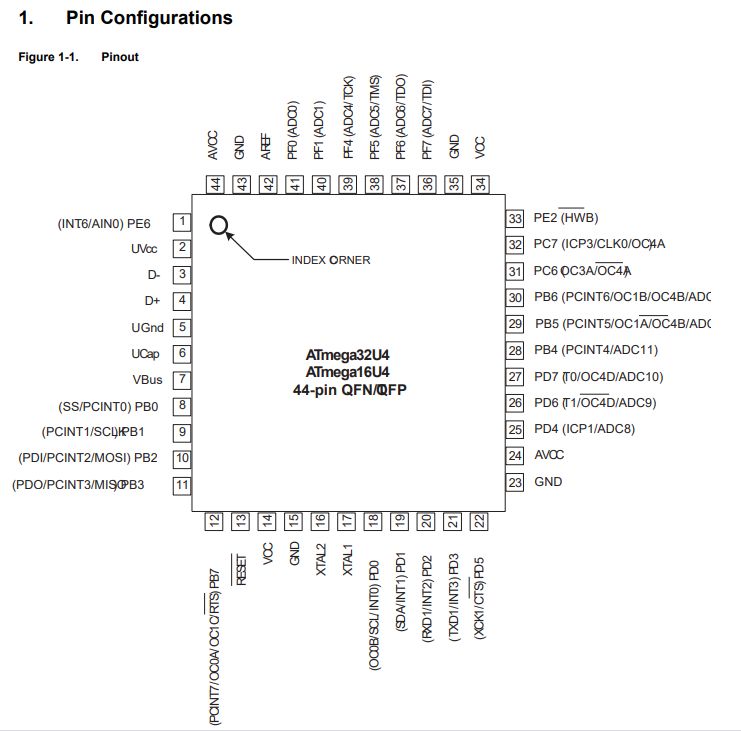
※ATMEGA32U4データシート3Pより抜粋
使用しているパーツの名称や機能は下記のとおりです。
| パーツ名称 | 機能・特長・できること |
| CPU | ArduinoLeonardoに使用されているATMEGA32U4を使っています。 出荷時にはArduinoLeonardoのブートローダと基本ファームウエアが書き込まれています。 |
| TTS 音声合成 |
株式会社アクエスト様の AquesTalkPicoLSI(ATP3012) をI2Cバスでて接続し、CPUからテキストを指定することでおしゃべり声を出力します。 コマンドなどは AquesTalkPicoLSIデータシート に従います。 |
| BEEP | 単音を出力します。 Arduinoのライブラリーtone関数を使用します。 |
| MIC | コンデンサーマイクからの音の大きさをアナロデータとして入力しています。 音のレベルは、512を中心に0方向と1023方向の上下に入力されるため、ユーザープログラムではその信号レベルで音の検知を処理します。 ※音声データの入力には対応していません。 |
| 超音波距離センサー | HC-SR04を利用しています。 参考記事① 参考記事② |
| サーボモータ | jxservoのOEM品を使用し、0~180度の回転ができます。 Servoクラスなどを利用して簡単にコントロールすることが可能です。 |
| モータ電源コントロール | サーボモータへの電源供給を自由にコントロールすることができます。 ※個別にON/OFFすることはできません。 |
| 電池電圧監視 | 電池電圧約5Vを1/2にした約2.5Vを基準に、現在の電圧をアナログポートに取り込んでいます。 |
| BLE | Microchip社BLEモジュールRN4020によるBluetooth通信です。 クムクムロボットでは、MLDP通信方式によって制御しています。 ユーザプログラミングではマホや外部のBluetooth機器を使ったコントロールも可能できます。 |

コメント